本文目录导读:
随着科技的不断进步,导航技术已经成为了现代社会不可或缺的一部分,在众多导航技术中,惯性导航技术以其独特的优势,在航空、航天、航海、机器人等领域得到了广泛的应用,而惯性测量单元(IMU)作为惯性导航技术的核心部件,其性能的优劣直接决定了导航系统的精度和可靠性,本文将详细介绍惯性导航技术及IMU的原理、应用及发展前景。
惯性导航技术概述
惯性导航技术是一种基于牛顿运动定律的自主导航技术,它通过测量载体的加速度,然后对时间进行积分,从而得到载体的速度和位置信息,由于该技术不依赖于外部信号,因此具有自主性高、抗干扰能力强、隐蔽性好等优点。
IMU的原理及组成
IMU,即惯性测量单元,是惯性导航技术的核心部件,它主要由三个相互垂直的加速度计和三个相互垂直的陀螺仪组成,加速度计用于测量载体的加速度,陀螺仪则用于测量载体的角速度,通过这两个关键参数的测量,IMU可以实现对载体的三维运动状态的精确感知。
IMU的工作原理
IMU的工作原理基于牛顿第二定律和角动量守恒定律,当载体发生加速或转动时,IMU中的加速度计和陀螺仪会感知到这种变化,并输出相应的电信号,通过信号处理电路对这些电信号进行放大、滤波、转换等处理,最终得到载体的加速度和角速度信息,这些信息经过积分运算,即可得到载体的速度和位置信息。
IMU在惯性导航中的应用
IMU在惯性导航中的应用主要是通过组合导航算法来实现的,组合导航算法将IMU测量的加速度和角速度信息与其它传感器(如GPS、磁力计等)的信息进行融合,从而得到更为精确的导航信息,在实际应用中,IMU通常与计算机控制系统配合使用,实现对载体的实时监控和精确控制。
IMU的优点及挑战
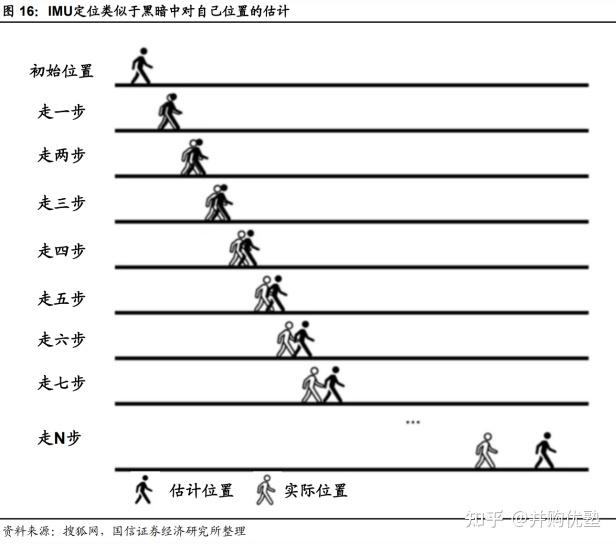
IMU作为惯性导航技术的核心部件,具有以下优点:一是自主性高,不依赖外部信号;二是抗干扰能力强,能在恶劣环境下正常工作;三是隐蔽性好,不易被敌方发现和攻击,IMU也存在一些挑战和限制,如长时间积分会导致误差累积、对初始位置敏感等,为了克服这些挑战,研究人员正在不断改进IMU的性能,提高其精度和可靠性。
IMU的应用领域及发展趋势
IMU在航空、航天、航海、机器人等领域得到了广泛的应用,在航空领域,IMU被用于飞机、导弹等载体的姿态控制和导航;在航天领域,IMU被用于卫星的姿态控制和轨道修正;在航海领域,IMU被用于船舶的航向和位置控制;在机器人领域,IMU被用于无人机的飞行控制和机器人的运动控制等,随着科技的不断发展,IMU的性能将不断提高,应用领域也将不断拓展,IMU将更加注重微型化、低功耗、高精度等方面的发展,以满足更多领域的需求。
惯性导航技术及IMU的原理、应用和发展前景具有重要的研究价值和应用意义,随着科技的不断发展,惯性导航技术和IMU的性能将不断提高,为现代社会的各个领域带来更多的便利和发展机遇,我们将看到更多的创新应用和技术突破,为人类社会的进步和发展做出更大的贡献。